

Navegar num ambiente de microgravidade é um desafio mesmo para astronautas humanos treinados, mas é ainda mais desafiante para robôs autónomos, limitando a sua utilização em locais como uma estação espacial.
Agora, no entanto, os pesquisadores de Stanford usaram inteligência artificial para dirigir um robô de vôo livre a bordo do Estação Espacial Internacional (ISS), potencialmente abrindo caminho para missões espaciais mais autônomas no futuro.
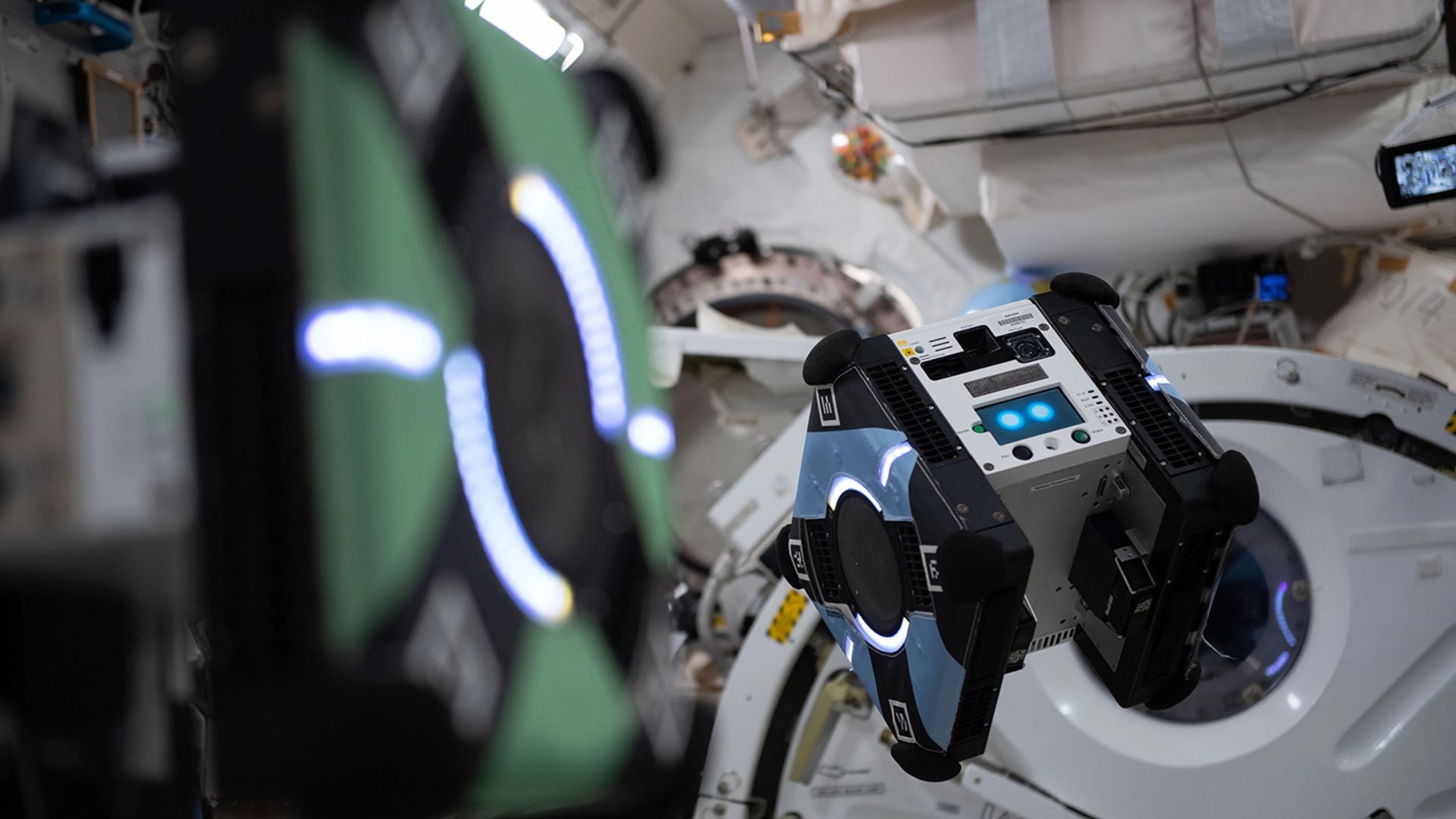
Trabalhando com o formato de cubo da NASA Robô Astrobeea equipe de pesquisa de Stanford demonstrou como um sistema de aprendizado de máquina pode planejar rotas seguras através dos módulos lotados da ISS de forma significativamente mais rápida do que os métodos existentes. Os avanços abordam um obstáculo de longa data para a robótica espacial – nomeadamente, como mover-se de forma rápida e segura com poder de computação limitado e intervenção humana mínima num dos ambientes de engenharia mais extremos possíveis.
A pesquisadora principal Somrita Banerjee, Ph.D. em Stanford. candidato, disse que o labirinto de equipamentos e experimentos da estação torna o planejamento de movimento especialmente desafiador, já que algoritmos que funcionam bem para robôs na Terra muitas vezes ficam atolados quando executados em computadores mais antigos e resistentes à radiação, certificados para voos espaciais.
Para contornar essas restrições, Banerjee e seus colegas começaram com uma abordagem de otimização padrão, descrita em um novo artigo apresentado no início deste mês no Conferência Internacional sobre Robótica Espacial, que divide um problema complexo de planejamento de movimento em muitas etapas menores. Eles então treinaram um modelo de IA em milhares de caminhos previamente computados, para que o sistema pudesse iniciar cada novo plano com um “início a quente” informado, em vez de calcular do zero.
“Usar um início quente é como planejar uma viagem, começando com uma rota que pessoas reais já percorreram antes, em vez de traçar uma linha reta no mapa”, disse Banerjee em um comunicado. Declaração da Universidade de Stanford. “Você começa com algo baseado na experiência e depois otimiza a partir daí.”
Esta abordagem permite verificações de segurança rigorosas antes das execuções, ao mesmo tempo que reduz o tempo real de computação. Nos testes na estação, as rotas geradas com o arranque a quente da IA foram cerca de 50% a 60% mais rápidas de calcular do que os planos convencionais, de acordo com os investigadores.
“Esta é a primeira vez que a IA é usada para ajudar a controlar um robô na ISS”, disse Banerjee. “Isso mostra que robôs podem se mover com mais rapidez e eficiência sem sacrificar a segurança, o que é essencial para missões futuras onde os humanos nem sempre serão capazes de guiá-los.”
Preparando o cenário para robôs de IA na ISS e além
Antes do teste em órbita, o sistema foi validado pela primeira vez no laboratório da NASA Centro de Pesquisa Ames no Vale do Silício, usando uma mesa de teste de granito com uma almofada de ar comprimido que permite que um robô deslize sobre ela como um disco de air hockey, imitando o microgravidade encontrado na ISS. Em órbita, os astronautas realizaram uma breve configuração e depois deixaram o Astrobee para ser comandado do solo, no que a NASA chama de experimento de “tripulação mínima”.
Durante uma sessão de quatro horas, os controladores de missão da NASA Centro Espacial Johnson em Houston, instruiu o Astrobee a voar 18 trajetórias, cada uma executada duas vezes com e sem a partida a quente gerada por IA. Salvaguardas adicionais, incluindo obstáculos virtuais e a capacidade de interromper uma corrida, foram utilizadas para evitar colisões.
A equipe diz que um planejamento semelhante guiado por IA poderia eventualmente permitir que os robôs lidassem com inspeções, logística e tarefas científicas em missões futuras para a luaMarte e além, liberando os astronautas para se concentrarem em trabalhos de maior prioridade.
“À medida que os robôs viajam para mais longe da Terra e as missões se tornam mais frequentes e de menor custo, nem sempre seremos capazes de teleoperá-los a partir do solo”, disse Banerjee. “A autonomia com garantias integradas não é apenas útil; é essencial para o futuro da robótica espacial.”
